|
| サイトマップ | |
||
|
| サイトマップ | |
||
LiDAR (light detection and ranging 「光検出と測距」の略) はデータ収集において人気の技術になりつつあります。(電波や音波ではなく) パルスレーザーを使って距離を測定する場合、LiDAR はレーダーやソナーと同じように動作します。LiDAR は、林業、洪水モデル、ビデオゲーム作成、気象、標高モデル、考古学、交通機関、宇宙飛行、ロボットなどに適用されます。私の好きな使い方には、NBA LIVE ビデオゲーム用のマディソン・スクエア・ガーデンの再作成、街中の道路を運転中の Google の無人自動運転車の支援や、国際宇宙ステーションとのドッキングにおける商用宇宙船 Dragon の支援があります。この記事では Voxler 4 の新機能、ネイティブ LAS フォーマットの LiDAR データのインポートと表示に焦点を当てていきます。
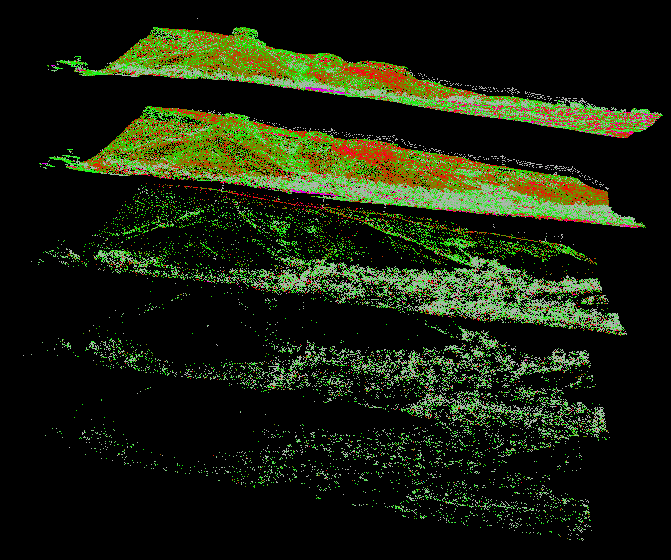
LiDAR デバイスは、陸上または空上に配備できます。デバイスは、建物や三脚の上など地面に固定された場所に置いたり、飛行機、ヘリコプター、または地球上空の宇宙船に付けることができます。通常、LiDAR デバイスは、GPS デバイス、慣性計測装置、カメラ、さまざまなハードウェアといった別のテクノロジーと連携して、正確さを確保します。LiDAR デバイスはレーザーパルスで領域をスキャンすることによって動作します。1つのパルスに対して、3回以上の光の反射があることがあります。これらの光の反射をリターンと呼びます。リターン (返ってくるもの) が何であるのかを示すため、LiDAR デバイスを装備して森の上空を飛んでいる飛行機を考えてみてください。レーザーパルスは、飛行機から地面に送られます。ただし、すぐには地面に到達しません。最初のリターンは木の上部の枝に反射し、2 番目のリターンは木の横の茂みに当たり、3 番目のリターンは木の場と茂みの間を通って最後に地面に当たるかもしれません。
 |
LiDAR データには、他の方法で収集されるデータに比べて多くの利点がありますが、特に突出した3つは精度、密度、および柔軟性です。精度と密度は LiDAR データと密接に関係しています。LiDAR デバイスは、1 秒間に 160,000 パルスを送信し、数百万のポイントを得られます。このような高密度のポイントクラウド (点群) を使うと、精度は通常 1 メートル未満 (縦15 センチ、横 40 センチ以内) になります。作成された数百万のポイントを使うと、データの隙間はほとんどありません。
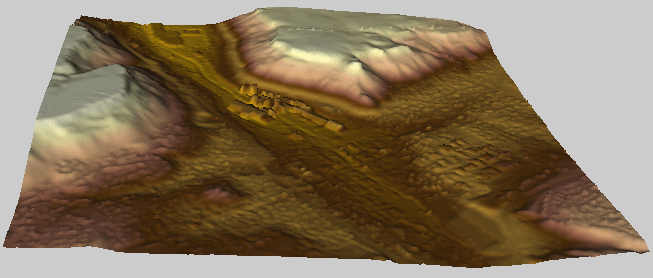 |
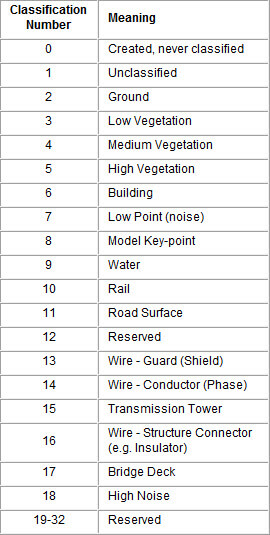
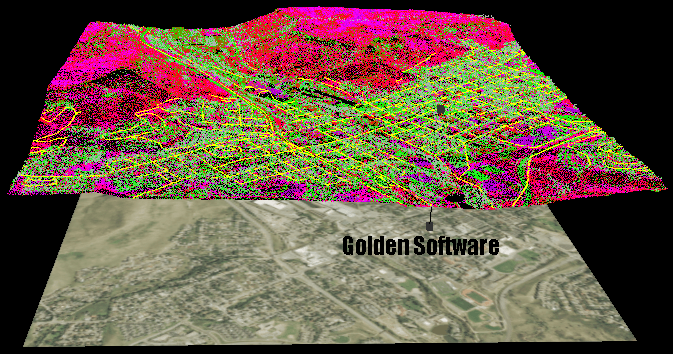
LiDAR データには優れた柔軟性が備わっています。ベンダーは、多くの異なるフォーマットの LiDAR データを供給する場合があります。これらのフォーマットには、(上記画像のような) デジタル標高モデルの作成に使用されるグリッドファイルやベクターファイル、表フォーマットデータファイル (DAT、CSV、XLSX、等)、ネイティブ LAS フォーマットが含まれています。Voxler にはグリッドファイル、ベクトルファイル、または表フォーマットデータファイルとして LiDAR データをインポートする機能が既にありました。Voxler 4 では、LAS フォーマットの LiDAR データもインポートすることが可能になりました。LAS ファイルは、レーザーによって収集された 3D ポイントクラウドデータを格納するパブリックなバイナリファイルフォーマットです。LAS は、American Society for Photogrammetry and Remote Sensing (ASPRS) によって管理されています。他の LiDAR のファイルフォーマットとは異なり、LAS ファイルには、ポイントごとのリターンと分類が含まれ、マッピング機能にさらなる柔軟性を追加します。Voxler は、ASPRS によって定義されている以下の分類をサポートします。
 |
Voxler の新機能、LAS インポートサポートは、フォーマットの汎用性を活用し、高密度のポイントクラウドをフィルターする機能を使って、使用者と使用者のプロジェクトにとって重要なデータに集中します。わずか4つの簡単な手順で、Voxler に LAS データをインポートできます。
下の GIF では、使用可能なフィルタリングオプションについて説明します。
 |
データをインポートした後、ScatterPlot モジュールを追加して表示し、Property Manager を使用して表示をカスタマイズし、データを最もよく表す驚くべきモデルを作成します。追加のデータをプロジェクトにインポートして、コンテキストを補足・追加することができます。
 |