|
| サイトマップ | |
||
|
| サイトマップ | |
||
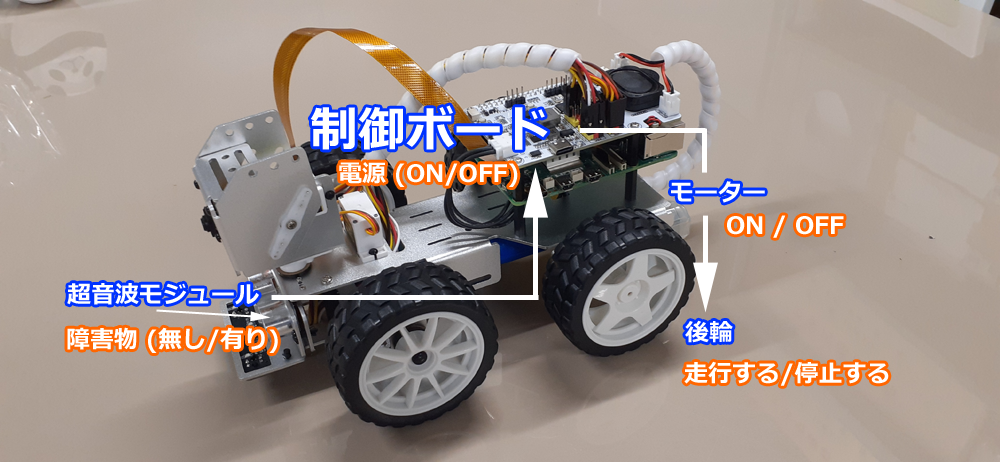
故障ネットは、システムにおける故障の広がりを記述します。故障と故障は、原因と影響(結果)の関係で関連付けます。故障ネットでは、故障には無限の数の原因と影響(または結果)が考えられます。あるシステムにおいて原因のみを持つ故障は、最上位レベルの影響と言います。一方、影響のみを持つ故障は、最下位レベルの故障または主原因と言います。別の言葉で言い換えれば、故障ネットは、最上位レベルの影響(結果)が主原因から中間段階を経てどのように発生するか、またはシステムにおいて主原因によってどの影響(結果)が引き起こされるかを記述します。主原因から最上位レベルの結果までの段階数は無制限です。故障を明確化(オブジェクト化)することによって、この「故障」に対して、予防措置や検出処置といった次のステップにつながる各種 IQ オブジェクトを設定できるようになります。
APIS IQ で故障ネットを作成してゆきます。システムの中の、どの要素でどのような「故障」が発生するかを明確化することが目的です。故障とは、機能の裏返しです。システムという文脈(コンテクスト)の中で各部品(各システム要素)が期待される役割(機能)をどう果たして「ない」のかを記述します。
例えば、以下のような具合になります。
| 超音波センサー | グレースケールセンサー |
|---|---|
| 障害物を検知する | 軌道を検出する |
| ↓ | ↓ |
| 障害物を検知しない | 軌道を検出しない |
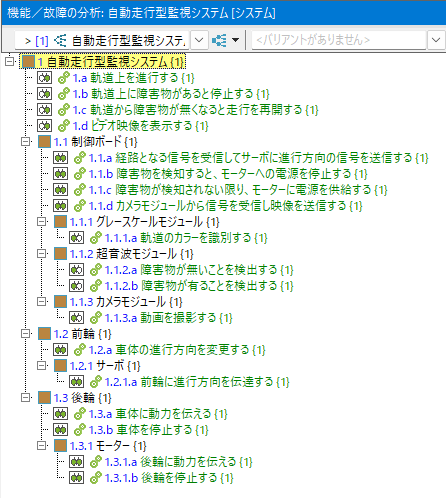
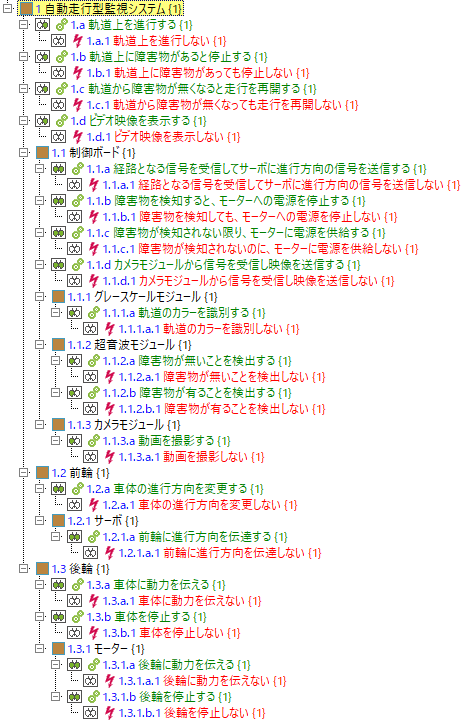
現在、9個のシステム要素に、18個の機能が設定されています。これらの1つ1つに、故障を記述します。
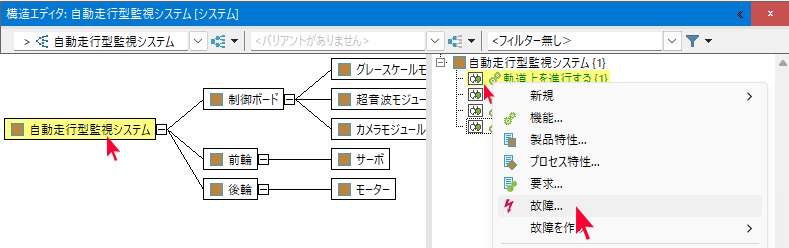
APIS IQ では、故障は、機能に対してアンカー設定します。まず、構造エディタで「自動走行型監視システム」を選択したら、そこに記載されている「機能」のいずれかを右クリックして「故障」を選択します。
ダイアログが表示されますので、「軌道上を進行する」という機能に対して、「軌道上を進行しない」という故障を記述します。リターンキーを押すと、下の欄に入力した内容が登録されます。
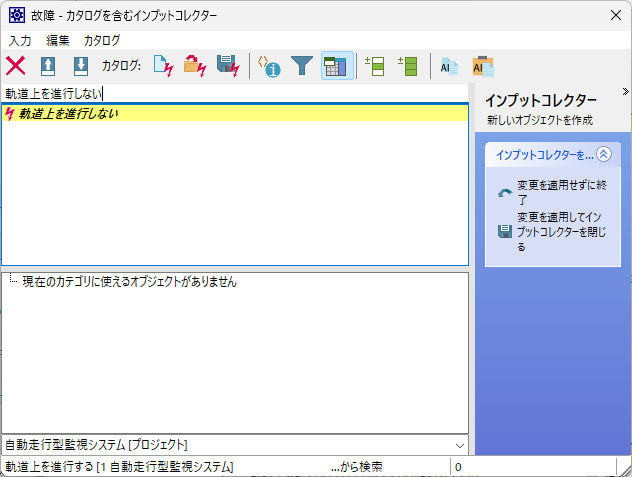
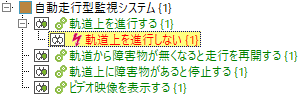
再度、リターンキーを押すと、「軌道上を進行する」という機能に対して「軌道上を進行しない」という故障がアンカー設定されます。
同様に、他の機能に対しても、それぞれ故障を記述してゆきます。入力する故障の内容は以下のとおりです。
| システム要素 | 機能 | 故障 |
|---|---|---|
| 自動走行型監視システムモーター | 軌道上を進行する | 軌道上を進行しない |
| 軌道から障害物が無くなると走行を再開する | 軌道から障害物が無くなっても走行を再開しない | |
| 軌道上に障害物があると停止する | 軌道上に障害物があっても停止しない | |
| ビデオ映像を表示する | ビデオ映像を表示しない | |
| 制御ボード | 経路となる信号を受信してサーボに進行方向の信号を送信する | 経路となる信号を受信してサーボに進行方向の信号を送信しない |
| 障害物を検知すると、モーターへの電源を停止する | 障害物を検知しても、モーターへの電源を停止しない | |
| 障害物が検知されない限り、モーターに電源を供給する | 障害物が検知されないのに、モーターに電源を供給しない | |
| カメラモジュールから信号を受信し映像を送信する | カメラモジュールから信号を受信し映像を送信しない | |
| グレースケールモジュール | 軌道のカラーを識別する | 軌道のカラーを識別しない |
| 超音波モジュール | 障害物が無いことを検出する | 障害物が無いことを検出しない |
| 障害物が有ることを検出する | 障害物が有ることを検出しない | |
| カメラモジュール | 動画を撮影する | 動画を撮影しない |
| 前輪 | 車体の進行方向を変更する | 車体の進行方向を変更しない |
| サーボ | 前輪に進行方向を伝達する | 前輪に進行方向を伝達しない |
| 後輪 | 車体に動力を伝える | 車体に動力を伝えない |
| 車体を停止する | 車体を停止しない | |
| モーター | 後輪に動力を伝える | 後輪に動力を伝えない |
| 後輪を停止する | 後輪を停止しない |
「機能/故障解析」ボタンをクリックすると、一覧で表示されます。
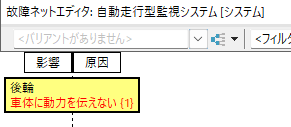
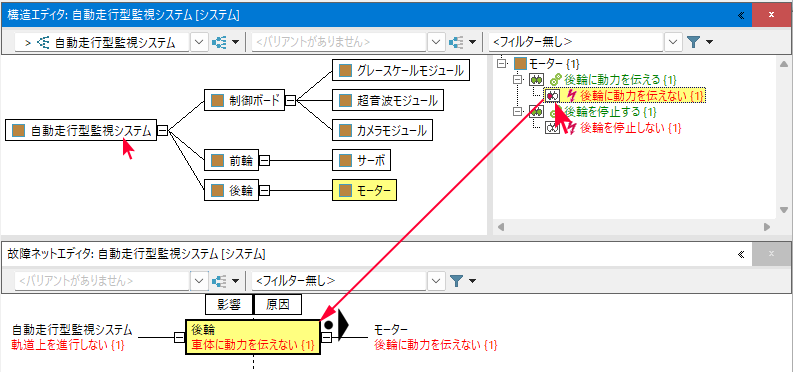
「故障」と「故障」の間に関係を構築してゆきます。まず、「自動走行型監視システム→後輪→モーター」ラインです。
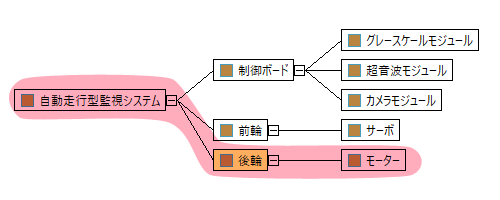
構造エディタで「後輪」を選択して、先ほど作成した故障アイコンをダブルクリックします。故障ネットエディタに「車体に動力を伝えない」が表示されます。「車体に動力を伝える」の上に「影響」「原因」が表示されます。これは、「後輪」が現在の「フォーカスエレメント」になっていることを示します。
「車体に動力を伝えない」の「影響」となるシステム要素は「自動走行型監視システム」です。ここには4つの故障が設定されていますが、このうち、「後輪」に関係するのは「軌道上を進行しない」になります。「原因」となるシステム要素は「モーター」です。モーターの故障は「後輪に動力を伝えない」です。
| システム要素 | 故障ネット | 故障 |
|---|---|---|
| 自動走行型監視システム | 影響 | 軌道上を進行しない |
| 後輪 | フォーカスエレメント | 車体に動力を伝えない |
| モーター | 原因 | 後輪に動力を伝えない |
構造エディタで「自動走行型監視システム」を選択して、表示される故障の中から「軌道上を進行しない」を選択して、故障ネットエディタの「後輪」の先頭付近までマウスをドラッグします。カーソルが三角と黒丸の形状に変わったらマウスボタンを離します。これで、後輪の影響となる故障として「軌道上を走行しない」が設定されました。
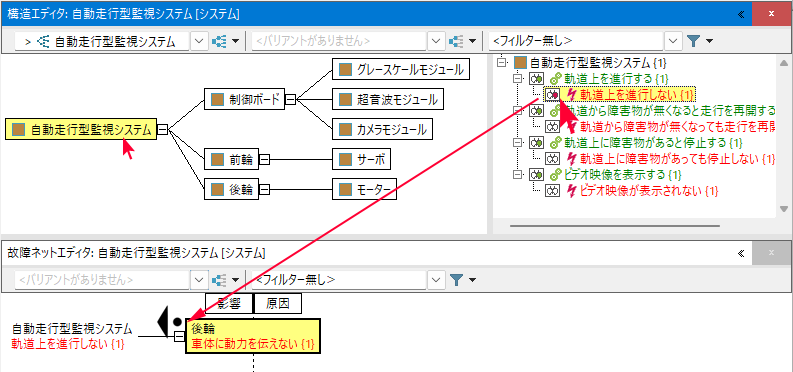
同様の操作で、構造エディタの「モーター」を選択し、その故障「後輪に動力を伝えない」を選択したら、故障ネットエディタの「後輪」の後部にドラッグして、後輪の原因となる故障を設定します。
「後輪」には、もう一つの故障「車体を停止しない」があります。これについても、同様に故障ネットを構築します。
| システム要素 | 故障ネット | 故障 |
|---|---|---|
| 自動走行型監視システム | 影響 | 軌道上に障害物があっても停止しない |
| 後輪 | フォーカスエレメント | 車体を停止しない |
| モーター | 原因 | 後輪を停止しない |
以上で、「後輪」に関する2つの故障ネットが出来上がりました。


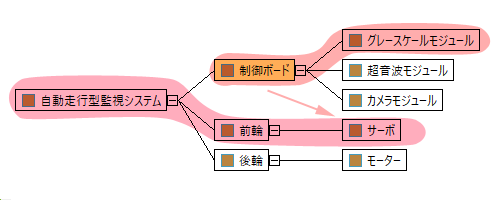
次に「自動走行型監視システム→前輪→サーボ」ラインを検討します。構造エディタで「前輪」を選択します。
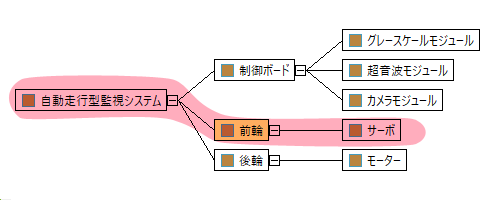
選択する故障は以下のとおりです。
| システム要素 | 故障ネット | 故障 |
|---|---|---|
| 自動走行型監視システム | 影響 | 軌道上を進行しない |
| 前輪 | フォーカスエレメント | 車体の進行方向を変更しない |
| サーボ | 原因 | 前輪に進行方向を伝達しない |
「前輪」に関する故障ネットは以下のとおりです。

次に「自動走行型監視システム→制御ボード→グレースケールモジュール」ラインを検討します。構造エディタで「制御ボード」を選択します。
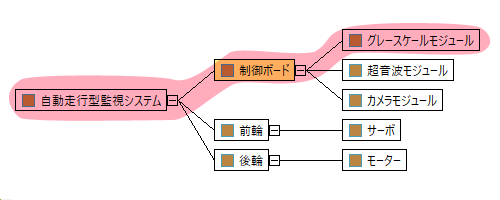
さて、機能ネットでも検討したように、グレースケールモジュールによって得られた信号は、「サーボ」に送られ、サーボが前輪に進行方向に関する情報を伝えることで、「自動走行型監視システム」が「軌道上を走行する」のでした。つまり、制御ボードの影響となる故障は「サーボ」の「前輪に進行方向を伝達しない」になります。
| システム要素 | 故障ネット | 故障 |
|---|---|---|
| サーボ | 影響 | 前輪に進行方向を伝達しない |
| 制御ボード | フォーカスエレメント | 経路となる信号を受信してサーボに進行方向の信号を送信しない |
| グレースケールモジュール | 原因 | 軌道のカラーを識別しない |
機能ネットエディタの「制御ボード」の先頭に、サーボの「前輪に進行方向を伝達しない」をドラッグします。サーボで設定した故障が継承されることが分かります。

次に「自動走行型監視システム→制御ボード→超音波モジュール」ラインを検討します。構造エディタで「制御ボード」を選択します。
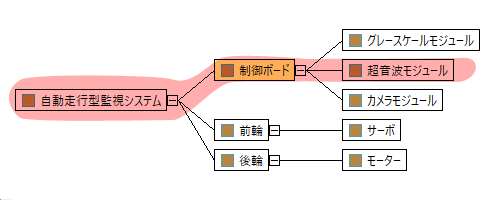
さて、機能ネットでも検討したように、システムを良く観察してみると、超音波モジュールから得られる信号は2種類あり、それに応じて、「制御ボード」の機能も2種類あり、その結果、「モーター」に電源が送られるか否かでシステムの挙動が左右されるのでした。つまり、制御ボードの影響となる故障は「モーター」の故障になります。
| システム要素 | 故障ネット | 故障 |
|---|---|---|
| モーター | 影響 | 後輪に動力を伝えない |
| 後輪を停止しない | ||
| 制御ボード | フォーカスエレメント | 障害物を検知しても、モーターへの電源を停止しない |
| 障害物が検知されないのに、モーターに電源を供給しない | ||
| 超音波モジュール | 原因 | 障害物が無いことを検出しない |
| 障害物が有ることを検出しない |
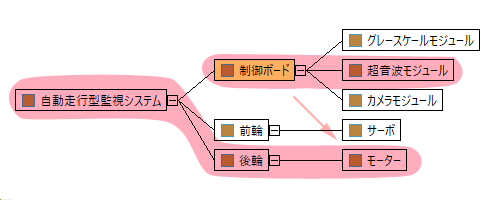
まず、「制御ボード」の「障害物を検知しても、モーターへの電源を停止しない」に着目します。この「原因」は、超音波モジュールの「障害物が有ることを検出しない」になります。「影響」については、モーターの「後輪を停止しない」になります。接続すると、モーターの故障ネットが以下のように継承されます。

次に、「制御ボード」のもうひとつの故障「障害物が検知されないのに、モーターに電源を供給しない」に着目します。この「原因」は、超音波モジュールの「障害物が無いことを検出しない」になります。「影響」については、モーターの「後輪に動力を伝えない」になります。

ここで、最初に設定した「後輪→モーター」ラインについて検討するため、モーターの「後輪に動力を伝ない」をフォーカスエレメントに設定してみましょう。
故障ネットの先頭から読むと、自動走行型監視システムが軌道上を進行しない原因は、後輪が車体に動力を伝えないか、モーターが後輪に動力を伝えないか、制御ボードが判断を誤って電源を供給しないか、超音波モジュールが障害物を検知しないからだという連鎖が説明されていることがわかります。

つぎに、「後輪」の「車体に動力を伝ない」をフォーカスエレメントに設定します。ここで、自動走行型監視システムのもう一つの機能「軌道から障害物が無くなっても走行を再開しない」も、おなじく後輪の「車体に動力を伝えない」の原因であることがわかります。「軌道から障害物が無くなると走行を再開しない」を「車体に動力を伝えない」と接続します。

最後に「自動走行型監視システム→制御ボード→カメラモジュール」ラインを検討します。構造エディタで「制御ボード」を選択します。
選択する故障は以下のとおりです。
| システム要素 | 故障ネット | 故障 |
|---|---|---|
| 自動走行型監視システム | 影響 | ビデオ映像が表示されない |
| 制御ボード | フォーカスエレメント | カメラモジュールから信号を受信し映像を送信しない |
| カメラモジュール | 原因 | 動画を撮影しない |
フォーカスエレメントに「制御ボード」の「カメラモジュールから信号を受信し映像を送信しない」を指定して、影響には「自動走行型監視システム」の「ビデオ映像が表示されない」を、原因には「カメラモジュール」の「動画を撮影しない」をそれぞれ接続します。

以上で、すべての故障とその関係を設定することができました。「機能/故障解析」ボタンをクリックして入力した機能を一覧で表示すると、「故障」アイコンの塗りつぶしが4種類あることがわかります。各アイコンをダブルクリックすると、フォーカスエレメントとする故障ネットエディタが表示されます。それぞれ内容が矛盾なく記述されているかご確認ください。
| アイコン | 意味 |
|---|---|
| リンク設定が無い故障 | |
| 原因のみにリンクがある故障 | |
| 影響と原因にリンクがある故障 | |
| 影響のみにリンクがある故障 |
9個のシステム要素に、18個の機能がアンカー設定され、それぞれの機能に18個の故障がアンカー設定されていることがわかります。

機能ネットを使えば、最上位の機能から末端の原因に至るまでの経路が分かりやすく表示されます。最上位レベルの4つの機能を表示してみましょう。機能とともに故障が表示されるのを確認できます。




「後輪」の「車体に動力を伝える」は2回登場し、点線の枠が付いています。これは、「車体に動力を伝える」をフォーカスエレメントに指定する分かるように、この機能は2つの影響にまたがっていることが分かります。

以上で、FMEA の基礎データとして重要となる構造ツリーの作成を通じてシステム要素のピックアップとツリーの作成、および、それらの機能的、故障的観点から因果関係を結びつける機能ネット、故障ネットの作成を行いました。