|
| サイトマップ | |
||
|
| サイトマップ | |
||
機能ネットは、主となる機能を確実に実行するために、それに従属する機能がシステム内でどのように相互作用するかを記述するものです。つまり、機能同士を因果関係で関連付けます。機能ネットでは、機能の原因と影響(「結果」と呼ばれることもあります)の数は無制限です。システム内で原因のみを持つ機能は、最上位機能または主機能と呼ばれます。システム内で結果のみを持つ機能は、最下位機能または基本機能と呼ばれます。言い換えれば、APIS IQ ソフトウェアの機能ネットは、中間機能を通じて基本機能から主機能がどのように派生しているのかを記述します。基本機能から最上位機能までのステップ数は無制限です。
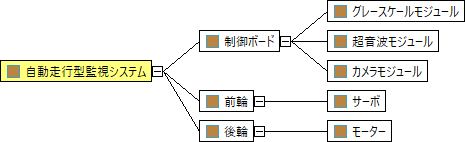
それでは、APIS IQ で機能ネットを作成していきます。前のステップで「構造ツリー」を作成しました。機能の記述は、このツリーに沿ってすすめてゆきます。なお、機能どうしのつながり (ネット) は必ずしも構造と同じツリー状では無い点に注意してください。枝から枝への接続もあり得ます。機能の中には、情報や動力の流れを単純に伝えるだけでのものもありますが、条件に応じて役割が変化するものもあります。制御ボードに関する条件分岐機能は若干複雑になりますので、読み飛ばしていただいても結構です。
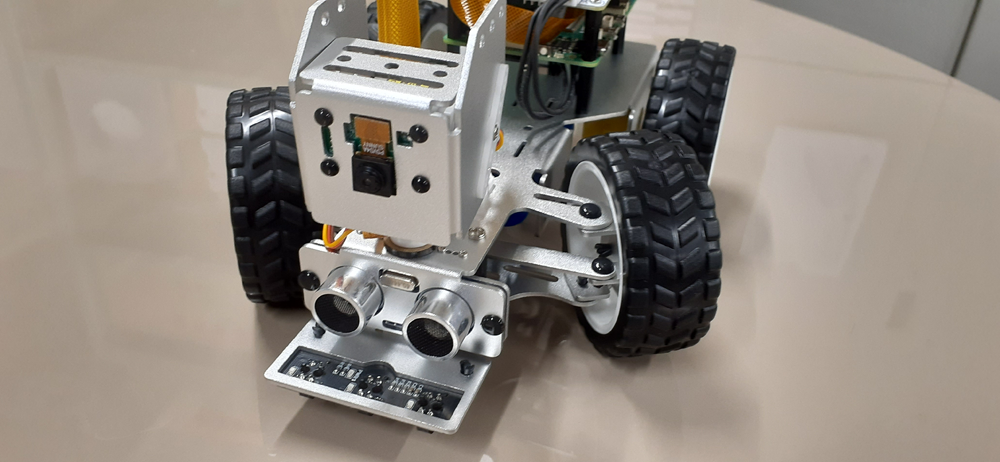
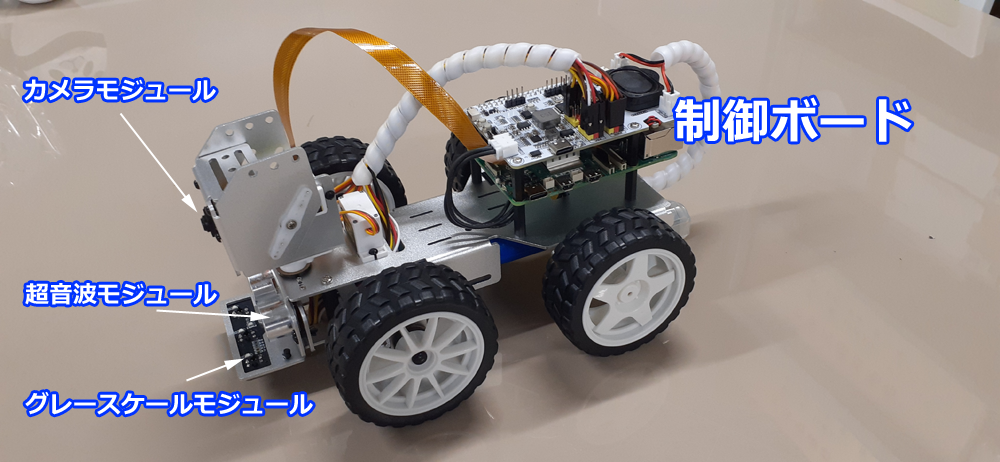
ここから、システム要素がシステムの中でどのような役割を果たしているのかという「機能」を記述してゆきます。ここで、「システム要素の機能を記述する」というのは、どういうことでしょうか?ある部品がそれ単体でおかれたときに記述される機能の内容と、その部品がシステムの中におかれたときに果たす役割を記述することはおのずと異なります。ここで記述する機能の内容は、1つのシステムという文脈(コンテクスト)の中でその部品が果たすべき役割になります。
例えば、以下のような具合になります。
| 超音波センサー | グレースケールセンサー |
|---|---|
| 超音波の反射を利用して 距離に応じた情報を数値で出力する |
色に関する濃度情報を数値で出力する |
| ↓ | ↓ |
| 障害物を検知する | 軌道を検出する |
1つの機能はある1つのシステムエレメントに割り当てられる。また、1つのシステムエレメントは複数の機能を持つことができる。日本語では「名詞」の後に「行動を表す動詞」を利用して記述する(出典:FMEA ハンドブック)
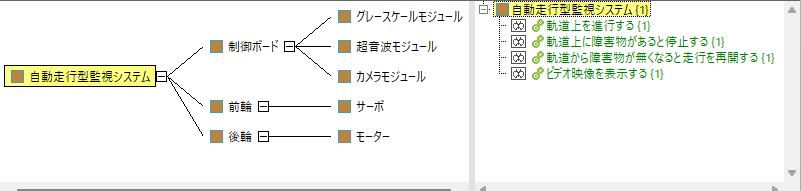
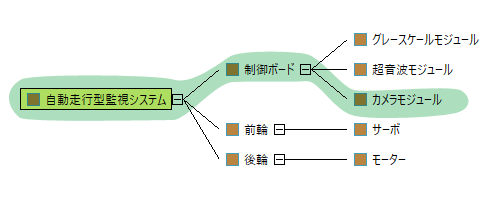
システム要素に機能を割り当てることを、APIS IQ では、システム要素に機能を「アンカー設定する」といいます(※APIS IQ では、「機能」以外にも「特性」をシステム要素にアンカー設定できます)。 まず「ルート」となる「自動走行型監視システム」の機能を記述します。これは、このシステムの果たすべき役割そのものです。ステップ1で検討した以下の4つです。
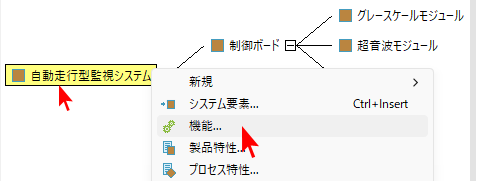
システム要素を右クリックして「機能」を選択します。「カタログを含むインプットコレクター」ダイアログが表示されます。
これらを簡潔で短い文でまとめて、4つの機能として追加します。
| システム要素 | 機能 |
|---|---|
| 自動走行型監視システムモーター | 軌道上を進行する |
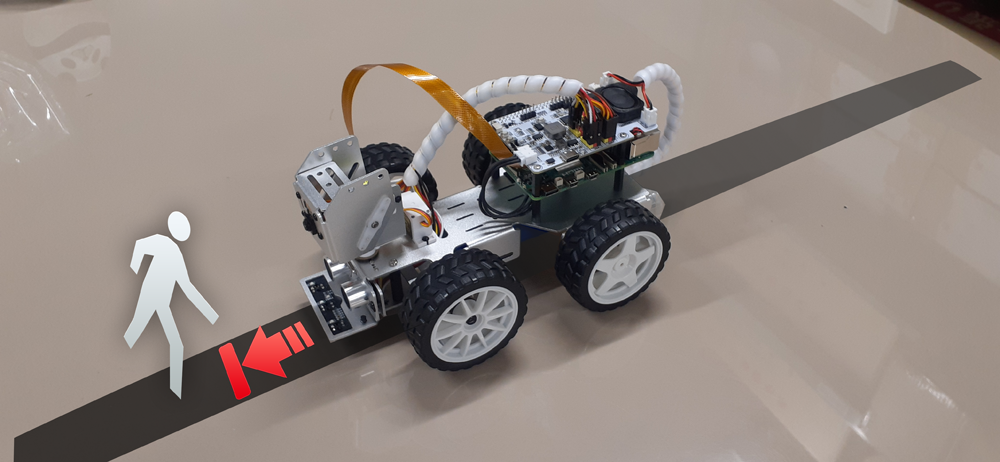
| 軌道上に障害物があると停止する | |
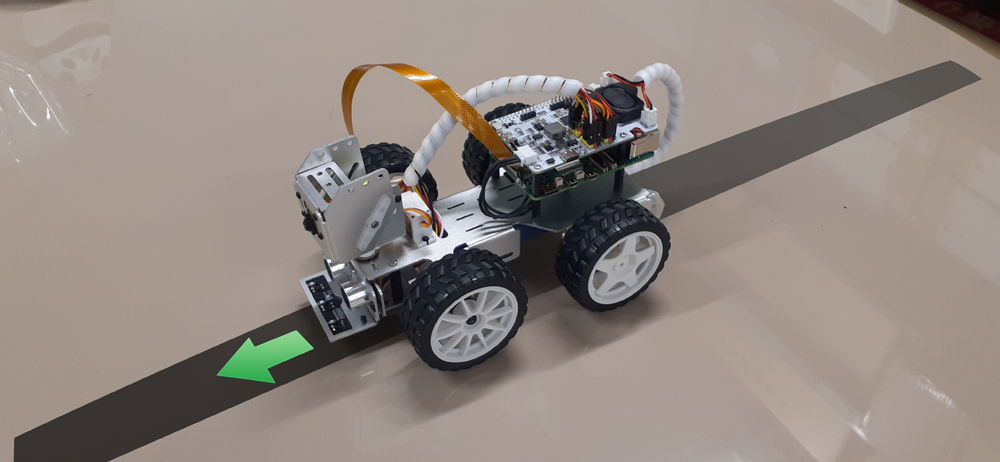
| 軌道から障害物が無くなると走行を再開する | |
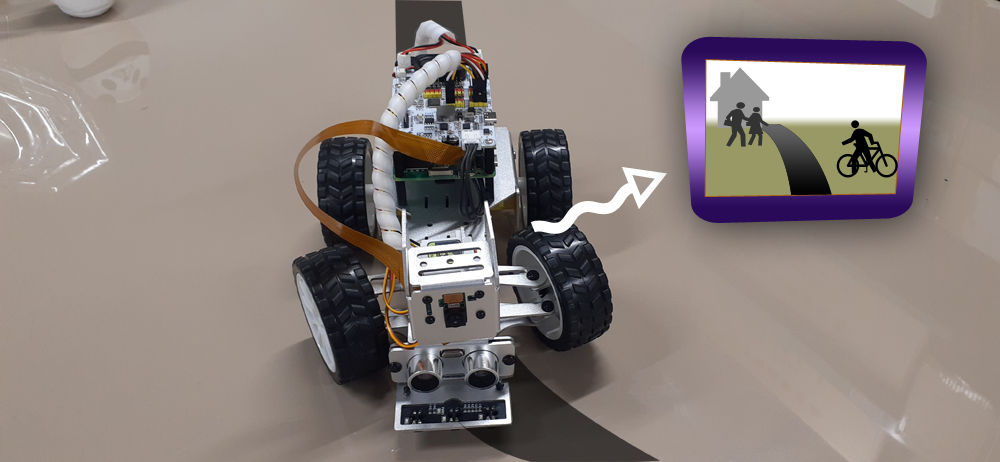
| ビデオ映像を表示する |
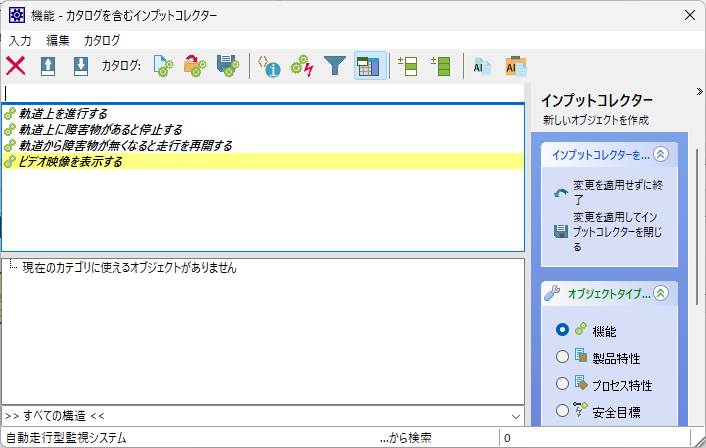
入力したらリターンキーを押します。構造エディタの右側に入力された機能がリスト表示されます。システム要素「自動走行型監視システム」に4つの機能がアンカー設定されたことを確認できます。
同様に個々のシステム要素について機能の記述を進めてゆきます。入力する順番は気にしなくても結構です。分かりやすいものから記述していくと良いでしょう。
まず、後輪→モーターのラインを記述します。
「後輪」の機能とは何でしょうか。このシステム全体を見渡して記述すると「後輪の役割は、モーターの動力を使って回転し、車体を前進させること」になります。このシステムにおける主たる機能は、モーターの動力を利用して「車体に動力を伝える」と記述できるでしょう。もう一つあります。それは、障害物が検知された場合、車体を停止することです。(このシステムにはブレーキはありません)したがって「車体を停止する」を追加します。「モーター」についても、「後輪に動力を伝える」と「後輪を停止する」という2つの機能を記述します。
| システム要素 | 機能 |
|---|---|
| 後輪 | 車体に動力を伝える |
| 車体を停止する | |
| モーター | 後輪に動力を伝える |
| 後輪を停止する |
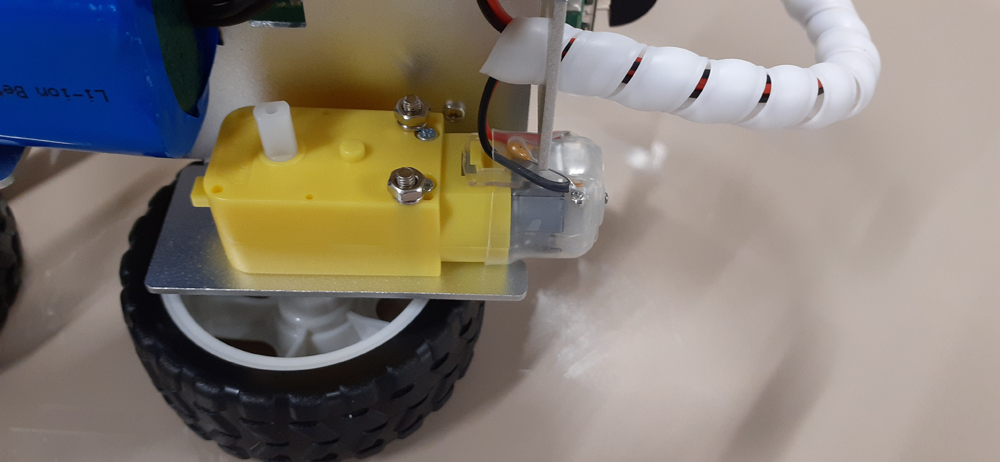
次に、前輪→サーボのラインを記述します。
前輪は車体そのものの進行方向を決定するものです。サーボは自動車のハンドルに相当します。サーボの軸が左右に回転することで、前輪に進行方向が伝わることになります。前輪とサーボの機能については、以下のように記述します。
| システム要素 | 機能 |
|---|---|
| 前輪 | 車体の進行方向を変更する |
| サーボ | 前輪に進行方向を伝達する |
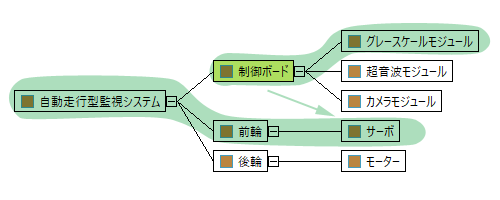
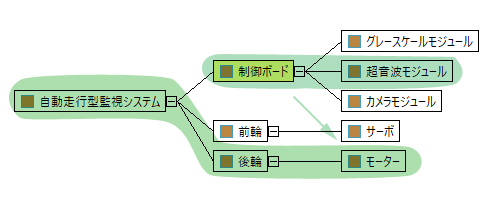
次に、制御ボード→グレースケールモジュールのラインを記述します。
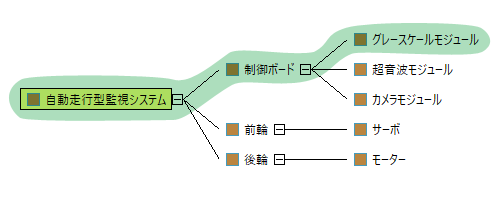
制御ボードの構造ツリーには3つのモジュールが接続されていますが、そのうち「グレースケールモジュール」との関係で記述する機能は以下のとおりです。
| システム要素 | 機能 |
|---|---|
| 制御ボード | 経路となる信号を受信してサーボに進行方向の信号を送信する |
| グレースケールモジュール | 軌道のカラーを識別する |
次に、制御ボード→超音波モジュールのラインを記述します。
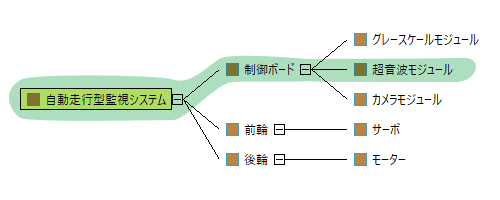
超音波モジュールは、「障害物を検出する」のが機能ですが、検出するか否かで、システム全体の動作が左右されます。障害物が検出されると車体が停止します。障害物が検出されなければ車体が動作します。この2つの場合分けのトリガーとなる2つの機能をそれぞれ記述します。
| システム要素 | 機能 |
|---|---|
| 制御ボード | 障害物を検知すると、モーターへの電源を停止する |
| 障害物が検知されない限り、モーターに電源を供給する | |
| 超音波モジュール | 障害物が無いことを検出する |
| 障害物が有ることを検出する |
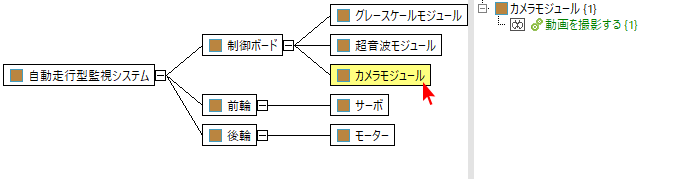
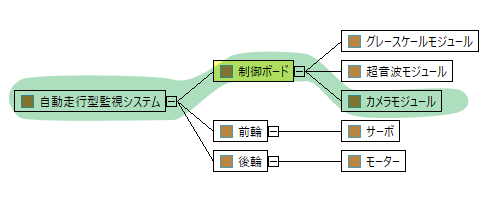
次に、制御ボード→カメラモジュールのラインを記述します。
| システム要素 | 機能 |
|---|---|
| 制御ボード | カメラモジュールから信号を受信し映像を送信する |
| カメラモジュール | 動画を撮影する |
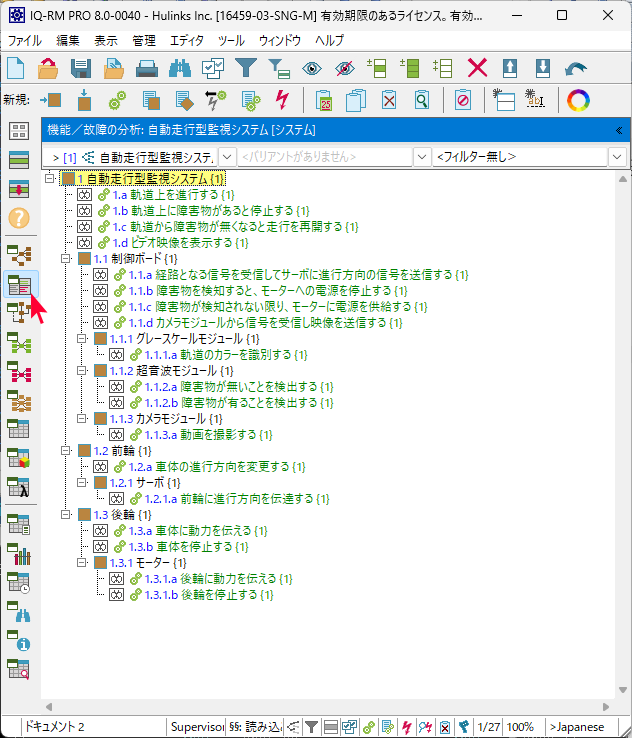
以上で、全てのシステム要素に機能を設定しました。構造エディタでシステム要素のいずれかをクリックするとそこに設定された「機能」を確認できます。
この事例で記述したシステム要素の機能全体は以下のとおりです。
| システム要素 | 機能 |
|---|---|
| 自動走行型監視システムモーター | 軌道上を進行する |
| 軌道上に障害物があると停止する | |
| 軌道から障害物が無くなると走行を再開する | |
| ビデオ映像を表示する | |
| 後輪 | 車体に動力を伝える |
| 車体を停止する | |
| 前輪 | 車体の進行方向を変更する |
| モーター | 後輪に動力を伝える |
| 後輪を停止する | |
| サーボ | 前輪に進行方向を伝達する |
| 制御ボード | 経路となる信号を受信してサーボに進行方向の信号を送信する |
| 障害物を検知すると、モーターへの電源を停止する | |
| 障害物が検知されない限り、モーターに電源を供給する | |
| カメラモジュールから信号を受信し映像を送信する | |
| グレースケールモジュール | 軌道のカラーを識別する |
| 超音波モジュール | 障害物が無いことを検出する |
| 障害物が有ることを検出する | |
| カメラモジュール | 動画を撮影する |
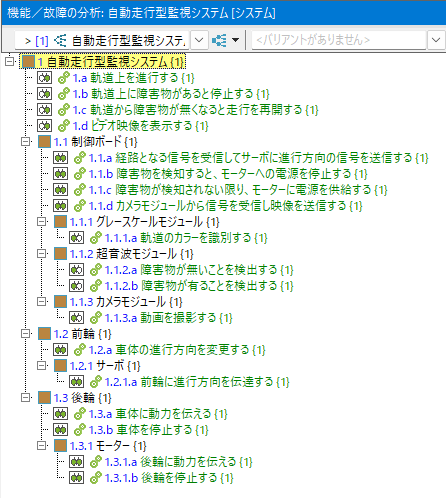
「機能/故障解析」ボタンをクリックすると、一覧で表示されます。
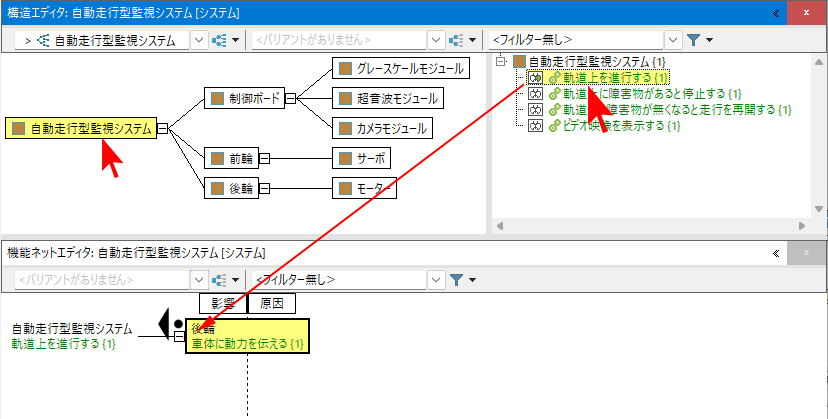
それでは「機能」と「機能」の間に関係を構築してゆきます。まず、「自動走行型監視システム→後輪→モーター」ライン検討します。構造エディタで「後輪」を選択します。
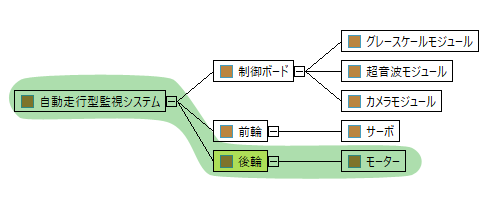
「機能ネットエディタ」を表示します(「車体に動力を伝える」機能のアイコンをダブルクリック)。以下の図のように「車体に動力を伝える」の上に「影響」「原因」が表示されます。これは、「後輪」が現在の「フォーカスエレメント」になっていることを示します。
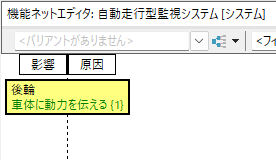
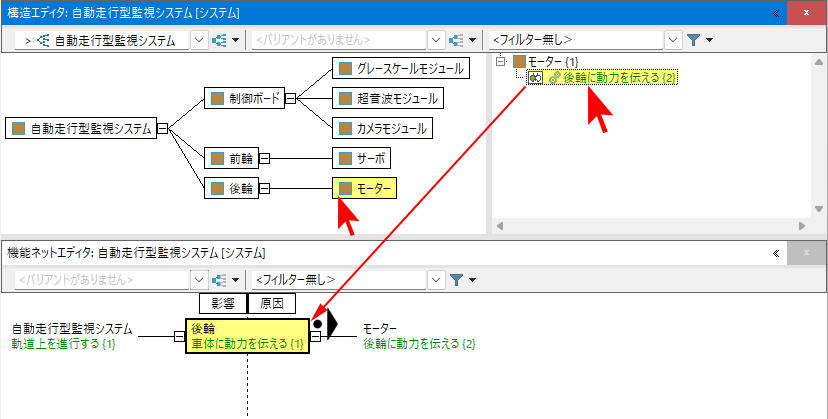
「後輪」の「影響」となるシステム要素は「自動走行型監視システム」です。「自動走行型監視システム」には4つの機能が設定されていますが、このうち、「車体に動力を伝える」に関係するのは「軌道上を進行する」になります。「原因」となるシステム要素は「モーター」です。モーターの機能は「後輪に動力を伝える」です。
| システム要素 | 機能ネット | 機能 |
|---|---|---|
| 自動走行型監視システム | 影響 | 軌道上を進行する |
| 後輪 | フォーカスエレメント | 車体に動力を伝える |
| モーター | 原因 | 後輪に動力を伝える |
構造エディタで「自動走行型監視システム」を選択して、表示される機能の中から「軌道上を進行する」を選択して、機能ネットエディタの「後輪」の先頭付近までマウスをドラッグします。カーソルが三角と黒丸の形状に変わったらマウスボタンを離します。これで、後輪の影響となる機能として「軌道上を走行する」が設定されました。
同様の操作で、構造エディタの「モーター」を選択し、その機能「後輪に動力を伝える」を選択したら、機能ネットエディタの「後輪」の後部にドラッグして、後輪の原因となる機能を設定します。
「後輪」には、もう一つの機能「車体を停止する」があります。これについても、同様に機能ネットを構築します。
| システム要素 | 機能ネット | 機能 |
|---|---|---|
| 自動走行型監視システム | 影響 | 軌道上に障害物があると停止する |
| 後輪 | フォーカスエレメント | 車体を停止する |
| モーター | 原因 | 後輪を停止する |
以上で、「後輪」に関する2つの機能ネットが出来上がりました。


次に「自動走行型監視システム→前輪→サーボ」ラインを検討します。
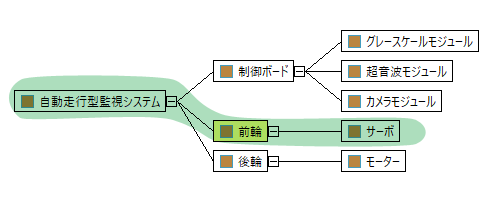
構造エディタで「前輪」を選択して、「車体の進行方向を変更する」をダブルクリックします。選択する機能は以下のとおりです。
| システム要素 | 機能ネット | 機能 |
|---|---|---|
| 自動走行型監視システム | 影響 | 軌道上を進行する |
| 前輪 | フォーカスエレメント | 車体の進行方向を変更する |
| サーボ | 原因 | 前輪に進行方向を伝達する |
「前輪」に関する機能ネットは以下ように作成できます。

次に「自動走行型監視システム→制御ボード→グレースケールモジュール」ラインを検討します。構造エディタで「制御ボード」を選択します。
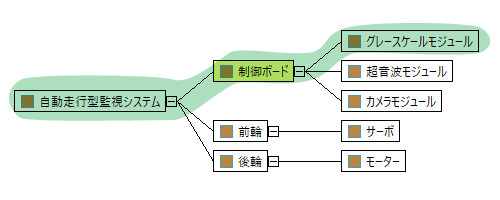
さて、「制御ボード」の「原因」は、「グレースケールモジュール」の「軌道のカラーを識別する」です。一方、「影響」は、構造ツリーに従って「自動走行型監視システム」の「軌道上を走行する」で良いでしょうか?
| システム要素 | 機能ネット | 機能 |
|---|---|---|
| 自動走行型監視システム? | 影響 | 軌道上を走行する? |
| 制御ボード | フォーカスエレメント | 経路となる信号を受信してサーボに進行方向の信号を送信する |
| グレースケールモジュール | 原因 | 軌道のカラーを識別する |
システムを良く観察してみると、グレースケールモジュールによって得られた信号は、「制御ボード」を通じて「サーボ」に送られ、サーボが前輪に進行方向に関する情報を伝えることで、「自動走行型監視システム」が「軌道上を走行する」ことがわかります。
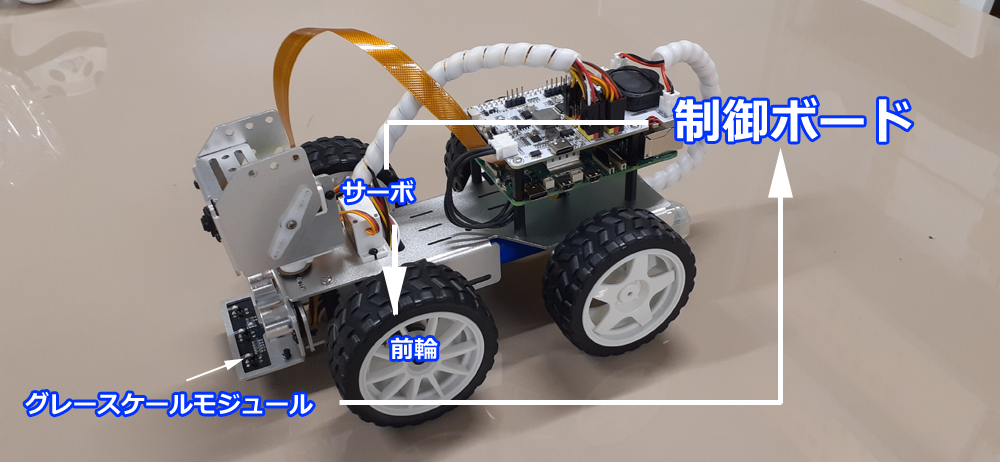
つまり、制御ボードの影響となる機能は「サーボ」の「前輪に進行方向を伝達する」になります。
| システム要素 | 機能ネット | 機能 |
|---|---|---|
| サーボ | 影響 | 前輪に進行方向を伝達する |
| 制御ボード | フォーカスエレメント | 経路となる信号を受信してサーボに進行方向の信号を送信する |
| グレースケールモジュール | 原因 | 軌道のカラーを識別する |
機能ネットエディタの「制御ボード」の先頭には、サーボの「前輪に進行方向を伝達する」をドラッグします。サーボの接続により、「前輪」の機能ネットが継承されます。

次に「自動走行型監視システム→制御ボード→超音波モジュール」ラインを検討します。構造エディタで「制御ボード」を選択します。
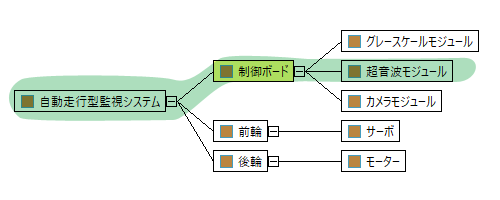
システムを良く観察してみると、超音波モジュールから得られる信号は2種類あり、それに応じて、「制御ボード」の機能も2種類あります。その結果、「モーター」に電源が送られるか否かでシステムの挙動が制御されるものでした。つまり、制御ボードの影響となる機能は「モーター」の機能になります。
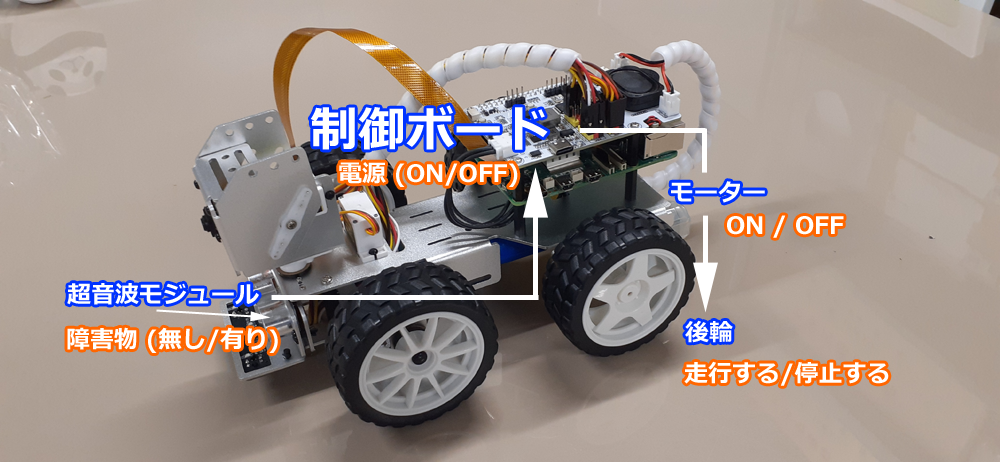
| システム要素 | 機能ネット | 機能 |
|---|---|---|
| モーター | 影響 | 後輪に動力を伝える |
| 後輪を停止する | ||
| 制御ボード | フォーカスエレメント | 障害物を検知すると、モーターへの電源を停止する |
| 障害物が検知されない限り、モーターに電源を供給する | ||
| 超音波モジュール | 原因 | 障害物が無いことを検出する |
| 障害物が有ることを検出する |
「制御ボード」の「障害物を検知すると、モーターへの電源を停止する」に着目します。この「原因」は、超音波モジュールの「障害物が有ることを検出する」になります。「影響」については、モーターの「後輪を停止する」になります。

次に、「制御ボード」のもうひとつの機能「障害物が検知されない限り、モーターに電源を供給する」に着目します。この「原因」は、超音波モジュールの「障害物が無いことを検出する」になります。「影響」については、モーターの「後輪に動力を伝える」になります。

ここで、最初に設定した「後輪→モーター」ラインについて検討するため、モーターの「後輪に動力を伝える」をフォーカスエレメントに設定してみましょう。

超音波モジュールで障害物が「無い」ことを検出し、その結果、モーターに電源が供給され、後輪に動力が与えられることで、自動走行型監視システムが軌道上を進行するという原因から影響までのつながりが、機能ネットを通じて矛盾なく説明されていることがわかります。
つぎに、「後輪」の「車体に動力を伝える」をフォーカスエレメントに設定します。ここで、自動走行型監視システムのもう一つの機能「軌道から障害物が無くなると走行を再開する」も、おなじく後輪の「車体に動力を伝える」の原因であることがわかります。
「軌道から障害物が無くなると走行を再開する」を「車体に動力を伝える」と接続します。

最後に「自動走行型監視システム→制御ボード→カメラモジュール」ラインを検討します。構造エディタで「制御ボード」を選択します。
選択する機能は以下のとおりです。
| システム要素 | 機能ネット | 機能 |
|---|---|---|
| 自動走行型監視システム | 影響 | ビデオ映像を表示する |
| 制御ボード | フォーカスエレメント | カメラモジュールから信号を受信し映像を送信する |
| カメラモジュール | 原因 | 動画を撮影する |
フォーカスエレメントに「制御ボード」の「カメラモジュールから信号を受信し映像を送信する」を指定して、影響には「自動走行型監視システム」の「ビデオ映像を表示する」を、原因には「カメラモジュール」の「動画を撮影する」をそれぞれ接続します。

以上で、すべての機能とその関係を設定することができました。「機能/故障解析」ボタンをクリックして入力した機能を一覧で表示すると、「機能」アイコンの塗りつぶしが4種類あることがわかります。各アイコンをダブルクリックすると、フォーカスエレメントとする機能ネットエディタが表示されるので、それぞれ内容が矛盾なく記述されているかご確認ください。
| アイコン | 意味 |
|---|---|
| リンク設定が無い機能 | |
| 原因のみにリンクがある機能 | |
| 影響と原因にリンクがある機能 | |
| 影響のみにリンクがある機能 |
9個のシステム要素に、18個の機能が設定されていることがわかります。
次のステップは、機能ネットに基づいて作成する故障ネットです。