|
| サイトマップ | |
||
|
| サイトマップ | |
||
 |
国立大学法人 東京農工大学 工学部 機械システム工学科 遠山研究室 遠山 茂樹 先生 |
シミュレーションを用いたロボットアームの部品選定システムの構築、および作成したシミュレーションモデルの実機との比較による妥当性の評価
ロボットアームのシミュレーションモデルを作成し、実際にロボットで行う動作をシミュレーションで再現することにより、モーターやバランサー装置などの検討を行っています。
モーターなどの構成部品やバランサー装置の取り付け位置を変更しながらシミュレーションを行い、関節への負荷やアームの挙動などのシミュレーション結果から妥当な製品の検討を行っています。また、実機で計測した値とシミュレーションモデルから導出した値を比較することで、実機、シミュレーションモデルそれぞれについての問題点を洗い出し、改良を重ねています。
試作機の代わりとしてシミュレーションモデルを用いることにより、モーターへの負荷などを確認することで、ロボットアームの設計に活かしております。
評価版を使用し、非常に使いやすかったので。
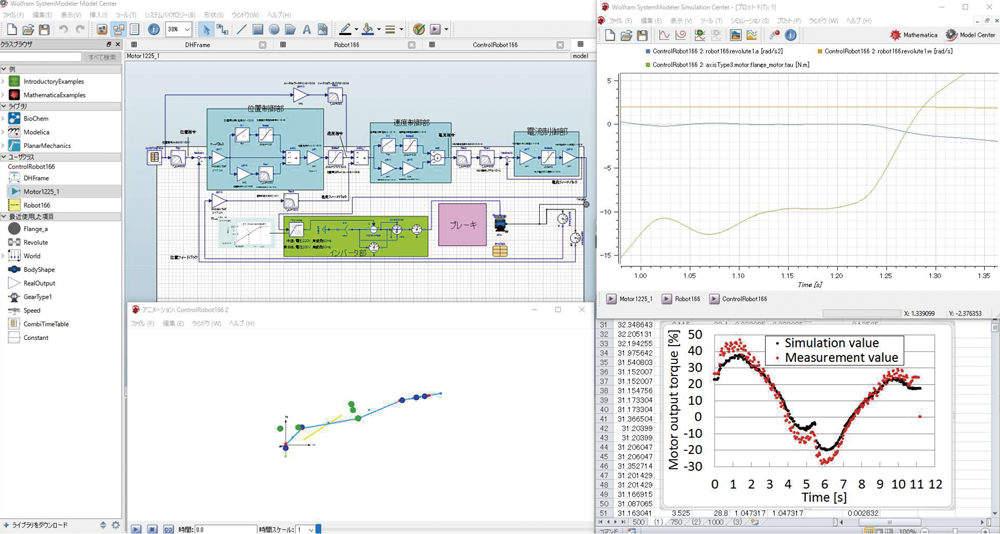 |
シミュレーションモデルを用いることにより、実際にロボットを動かした際にかかる負荷を想定した部品選定システムを構築することができました。また、ロボットのバランサー装置について、その取り付け位置は最適化が難しいのですが、今回シミュレーションモデルにより検討を行うことで、実際の試作を重ねることなく最適な取り付け位置を導出することができました。さらに、実機の計測値とシミュレーション値を比較することで、実機特有の摩擦などの現象を明らかにし、シミュレーションモデルに組み込むことで、より精巧なシミュレーションモデルを作成することができました。
複雑な機構やロボットなどの設計を行う研究者に勧めたい製品です。
本事例作成に関し、遠山先生のご協力に感謝いたします。
(インタビュー:2017 年 2 月)