|
| サイトマップ | |
||
|
| サイトマップ | |
||
ランダムな間隔からなるデータを等間隔のグリッドに変換するのに何時間もかかっていたことを覚えていますか? これまで、等高線マップやさまざまなマップを作成するには、データを手動で補間する必要があり、特にデータセットが大きい場合は簡単ではありませんでした。ありがたいことに、地形モデリングはもはや初期の段階ではありません。テクノロジーは大きく進歩しました。最近では、高度なグリッド化アルゴリズムを使用して、数千ポイントのデータをほとんど時間をかけずにグリッドやラスターに変換できるようになっています。この記事では、LiDAR データのグリッド化のベストプラクティスについて説明します。
背景を説明しましょう。LiDAR の人気は引き続き急上昇しています。2015 年に発表されたレポートでは、世界の LiDAR 市場は 2022 年までに 9 億 4,430 万ドルに達し、年平均成長率 (CAGR) 17.3% で成長すると予測されていました。最新のレポートによると、LiDAR 市場はこれらの予想を上回り、2022 年には 19 億ドル、2023 年には 23 億 1,000 万ドルに達します。2024 年になっても、依然として期待は高いままです。同じ最近のレポートでは、市場は 2030 年までに 79 億 4,000 万ドルに達し、CAGR 19.3% になると予測されています。別のレポートでは、2033 年までに市場は 84 億ドルに急増すると予測されています。
これらの数字は驚くべきものではありません。地理空間業界、さらには Apple のようなテクノロジー大手でさえ、LiDAR データのユニークな用途を紹介しています。ただし、人気があるからといって、それが使いやすいとは限りません。ましてや等高線マップの作成に必要なグリッドに補間するのは容易ではありません。
LiDAR データのグリッド化における最大の課題は、データセットの膨大なサイズです。LiDAR データには、1 つのファイルに数千万ポイントが含まれることも珍しくありません。適切なグリッド化方法がなければ、クライアントや上司が納得するようなマップを作成するのに必要以上に時間を費やす可能性があります。
さらに、LiDAR データセットは通常は膨大であるため、必要以上に詳細な情報がマップに含まれる場合もあります。データを微調整するための適切なフィルターとパラメーターがなければ、情報があまりにも多すぎて見る人を圧倒し、伝えようとしているストーリーが伝わりにくくなってしまうリスクがあります。
良いニュースがあります。課題はありますが、それを克服する方法はあります。お持ちの LiDAR データセットを Surfer で グリッド化する際に、時間を節約して最良の結果を得るための3つの戦略をご紹介します。
数百万のポイントを扱う場合、ストーリーに最もふさわしいデータに焦点をしぼることは大事です。そこで、インポート フィルターが役立ちます。最初のステップは、インポート時に LiDAR データをフィルターして、最も重要な調査データのみをグリッド化で考慮するようにすることです。
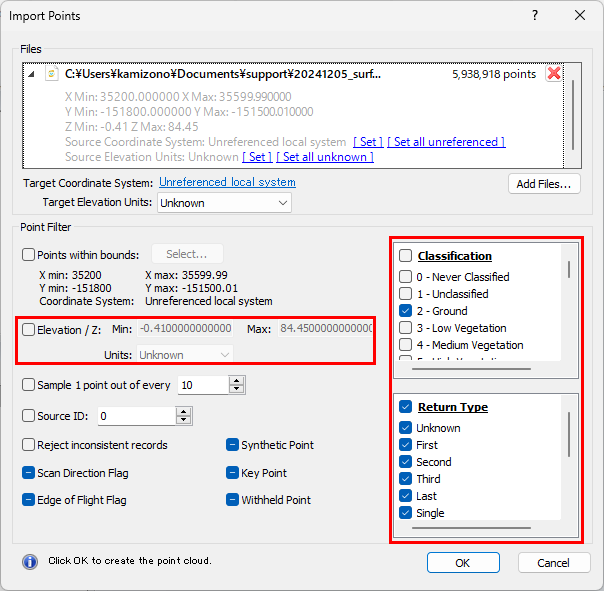
たとえば、elevation 値を調整することで、雲、鳥、電話線、木などの空のデータ ポイントを除外できます。また、classification (分類) 別にデータを絞り込み、低木から高木、建物、送電塔、鉄道などにのみ焦点を当てることもできます。インポートしたポイントを特定の return type (リターン値) に制限したい場合は、戻り値の種類でフィルタリングすることもできます。さらに、N 番目の値ごとにインポートするように指定することもできます。これは、視覚的な表示に不要なデータが多すぎる場合に特に役立ちます。
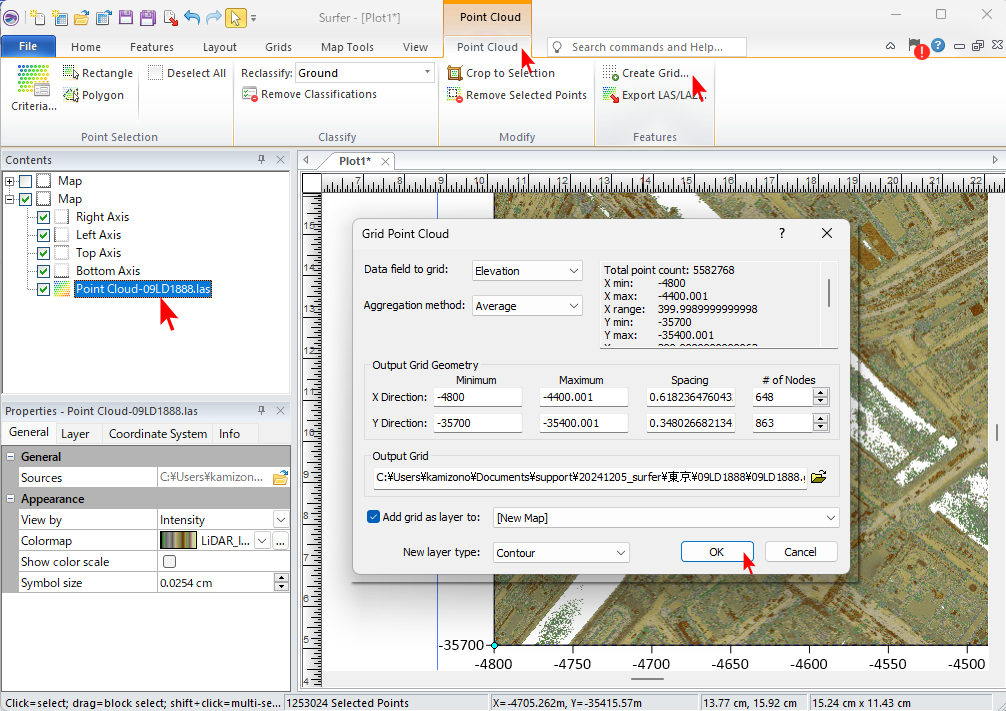
次のステップは、LiDAR データセットから Point Cloud レイヤーを作成し、その Point Cloud レイヤーからグリッドを作成することです。この方法を使用すると、大規模なデータセットであっても、ほぼ即座にグリッドを作成できます。従来のグリッド手法では、このような即座に結果を得るのは困難です。
たとえば、1,000 万のデータ ポイントを含む LAS ファイルがあるとします。もちろん、クリギングなどの一般的な手法を使用することで柔軟性と視覚的に富む魅力的なマップを作成できることは良く知られるていますが、このアプローチでグリッドを生成するには多くの時間がかかる場合があります。時間に追われ、レポートを迅速に作成する必要がある場合には、クリギングやその他の従来の方法を使用して Point Cloud データをグリッド化するのは効率的ではありません。
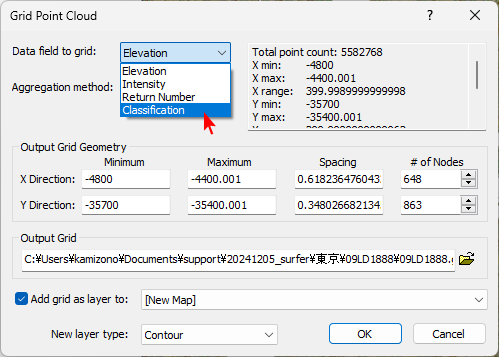
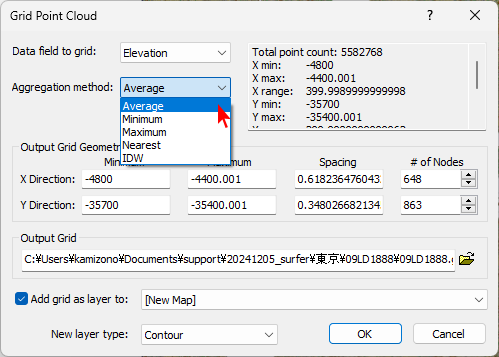
グリッドパラメータを調整するときに考慮すべき主な要素は2つあります。グリッド化するデータフィールド (Data field to grid) とグリッドの解像度です。最初の要素は単純です。Point Cloud レイヤーからグリッド化する対象を決定するだけです。elevation (標高) データ、intensity (強度)、classification (分類)、return number (リターン値) を選択できます。
2 番目の要素、すなわち、解像度には、もう少し周辺の情報と熟慮が必要です。グリッド解像度は、画像のピクセル数と考えてください。高解像度の写真があらゆる細部を捉えるのと同様に、高解像度のグリッド ファイルはデータのニュアンスを強調します。一般的に、低解像度、中解像度、高解像度のグリッドには、最長の辺に沿って約 100、500、1,000 以上のノードがあると考えてください。サムネイルからフルサイズの画像に移行するのと同じように、レベルが上がるごとに詳細が表示されます。
さて、完璧なグリッド解像度を選ぶ際に重要なのは、何を見る必要があるかです。すべての細部の情報が重要な場合は、グリッドノードは最も近いデータポイントのペアと同じくらい密集している必要があります。群衆の中のささやき声を聞き逃さないようにするのと同じだと考えてください。しかし、全体像に興味があり、それらの細部を気にしなくてもよい場合は、平均データ距離に基づいてノードの間隔を空けるとうまくいきます。
データセット内のポイントの数を考慮することも重要です。数百万のデータ ポイントをインポートする場合は、1 ~ 5 フィート間隔の低解像度グリッドの方が適している可能性があります。そうしないと、グリッドに詳細が表示されすぎて、関係者に伝えるストーリーが損なわれる可能性があります。
LiDAR データのグリッド化に関して我々が提供したベストプラクティスはいずれも Point Cloud レイヤーを作成することにかかっていますが、グリッド化する方法だけがそれではありません。Surfer を使用する場合は、従来の方法を採用し、“Grid Data” をクリックしてそこから進むことができます。ただし、簡単に触れたように、従来の方法を使用して LiDAR データをグリッド化することは、必ずしも最善の選択肢であるとは限りません。この点をご理解いただくために、従来の方法と Point Cloud 専用のベストプラクティスを比較した表を以下に示します。
| 従来の方法: Grid Data |
Point Cloud 専用の方法: Grid from a Point Cloud Layer |
|
|---|---|---|
| インポート フィルタ |
以下のように限定的: Spatial Filters Validity Filters Sample Filters Classification |
以下のように多様な選択肢: Spatial Filters Validity Filters Sample Filters Classification Elevation Value Return Type |
| グリッド オプション |
多目 | 少な目 |
| 補間アルゴリズム | すべてのデータセットに適したさまざまなオプション | LiDAR データセット専用に設計されたオプション |
| グリッド作成 スピード |
遅い(場合によっては実行可能な選択肢には遅すぎる) | 高速(ほぼ瞬時) |
| グリッド精度 | 通常は悪くなる | 通常は良くなる |
| グリッドの外観 | 通常は悪くなる | 通常は良いくなる |
LiDAR データのグリッド化には課題が伴いますが、決して克服できないものではありません。適切なグリッド化方法、フィルター、解像度、パラメーターを使用すれば、Point Cloud データを迅速にグリッド化して、自分や関係者が確認する必要のあるものを正確に示すマップを作成できます。お持ちの LAS または LAZ ファイルでこれを体験してみませんか? 今すぐ Surfer の 14 日間無料トライアルをダウンロードしてください。